kreissegment plattform

|
kreissegment plattform |
|
Die im Nachfolgenden vorgestellte Plattform ist bewusst sehr simpel gehalten mit den Vorteilen, dass sie sehr einfach zu bauen ist und dass sie keinen großen Material- oder Kostenaufwand erfordert. Sie verwendet ein Kreissegment (Circle Segment, CS) als Nordlager, und wird oft auch Cylindrical Bearing Plattform genannt. Sie kann von daher gut als Einstiegsprojekt dienen, von dem ausgehend man dann auch gut eigene Ideen entwickeln kann. Diese Plattform hat einen Reibungsantrieb, der mechanisch sehr einfach zu realisieren ist und der über einen einfachen Gleichstrom-Getriebemotor ohne elektronische Regelung angetrieben werden kann. Ich mache immer wieder die Erfahrung, dass sich Leute vom Bau einer Plattform abhalten lassen, weil sie sich nicht zutrauen, die Antriebselektronik in den Griff zu bekommen. Mit dem hier vorgestellten Antrieb ist dies kein Problem, er stellt sicherlich eine der am einfachsten zu realisierenden Lösungen dar und ist trotzdem voll funktionstüchtig. Ansonsten kann der Antrieb selbstverständlich weiter verfeinert werden, zum Beispiel mit einer geregelten Spannungsversorgung (siehe hier), einer Drehzahlsteuerung, oder mit einem kompletten Schrittmotorantrieb mit aufwendiger Elektronik, der dann allerdings nicht mehr über ein kleines Batteriepack betrieben werden kann.
|
|
Hier ein Bild der Äquatorial-Plattform mit einem 14" Dobson. Die Plattform selbst ist nur 9 cm hoch und ersetzt das normale, 3 cm hohe Bodenbrett des Teleskops. Die Plattform erhöht somit die Bauhöhe des Dobsons nur um 6 cm (was bei Teleskopen dieser Größe über Treppchen oder Beobachtung vom Boden entscheiden kann). zu diesem Plattform-Typ erschien ein Artikel in Sterne und Weltraum 11/2006
|
Auf die Planung der Plattform ...
wird im Detail hier eingegangen
Bau einer einfachen Kreissegment-Plattform
|
|
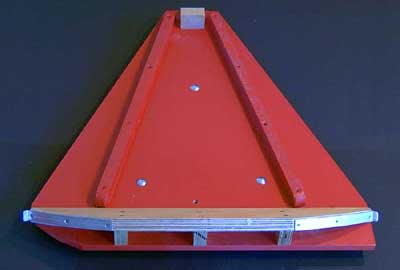
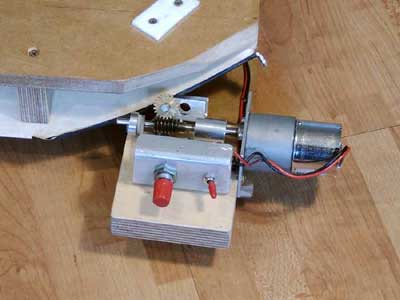
Der Tisch und das Bodenbrett bestehen aus 10 mm Hartfaserplatte, lackiert, wobei Sperrholz sicher die bessere Wahl ist. Der Tisch ist über Längsleisten zusätzlich versteift. Die Nord-Rollenlager bestehen aus Möbelrollen und sitzen auf kleinen, 21 mm starken Multiplexbrettchen, die verschoben werden können (M6 Schlossschrauben in 15 mm Bohrlöchern). Dadurch kann man die Rollen schön an das Kreissegment anpassen und dann durch Anziehen der Schrauben in der optimalen Position fixieren. Das ist sehr wichtig, da die Verkippung und Verdrehung der Rollen recht komplex ist. Das Kreissegment wurde mit einer Handstichsäge aus 21 mm Multiplex ausgesägt und über kleine Dreiecke an die Tischunterseite geschraubt (siehe z.B. Bild am Anfang der Seite). Das Aussägen des Segments kann unter Umständen Probleme bereiten, falls das Sägeblatt beim Schnitt "wandert" und sich verbiegt, da dann die Schnittkante nicht mehr rechtwinklig ist. Hier ist sehr viel Gefühl und eine gute Stichsäge gefragt. Sehr viel einfacher geht das ganze mit einer Oberfräse, für die man einen genügend großen Zirkelansatz baut. |
|
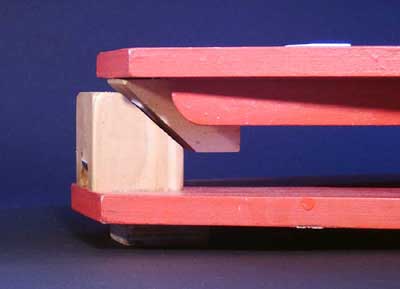
Das Südlager besteht aus einer Schloss-Schraube mit einer Kunststoff-Unterlegscheibe zwischen zwei Stahlunterlegscheiben. Ein Kugellager oder ähnliches ist hier nicht notwendig. Hier sieht man auch, dass das Teflonpad des Azimutlagers des Dobsons nicht genau über dem Südlager der Plattform liegt, was durch die Versteifung des Plattform-Tisches jedoch kein Problem bereitet. |
|
|
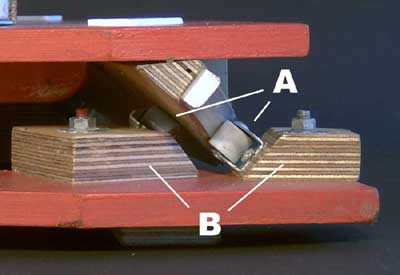
Das linke Nord-Rollenlager. Die Rollen (A) sind ganz gewöhnliche Möbelrollen aus dem Baumarkt, die vom Rundlauf ausreichend sind. Sie sind auf den schon oben beschriebenen justierbaren Multiplexbrettchen montiert (B). Die Rollen wurden dabei auf die mit der Kreissäge abgeschrägte Vorderkante geschraubt. Auf die Laufflächen des Kreissegments wurde ein Aluflachprofil geschraubt. Die Länge der Kreissegmente (~ 200 mm) reicht für über eine Stunde Nachführung. Die linke Rolle unterstützt das Kreissegment von hinten und hilft, die Last auf die einzelnen Rollen zu verringern und ein Verkanten zu vermeiden. Man sieht hier auch schön, dass die beiden anderen Teflonpads des Azimutlagers des Dobsons ziemlich direkt über den Nordlagern der Plattform montiert wurden. |
|
Antrieb der Plattform
|
|
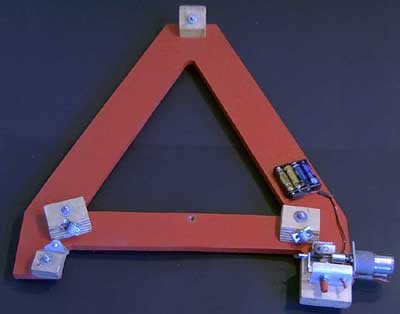
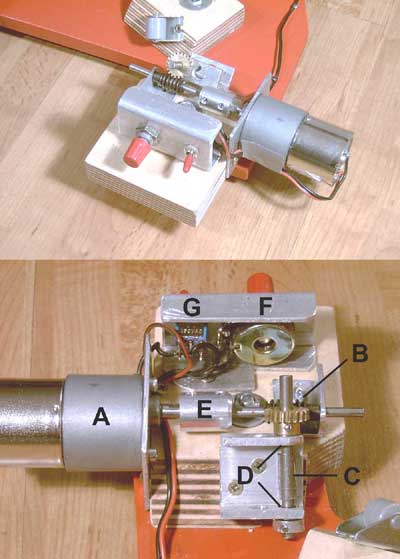
Ich wollte bei meiner Plattform keinen Spindel- oder Tangentialarm-Antrieb, wie er oft realisiert ist, sondern einen Direktantrieb, bei dem der Plattformtisch zur Rückstellung einfach angehoben werden kann. Das Nordlager-Segment läuft direkt auf einer Antriebswelle aus Stahl, welche in kleinen Flanschkugellagern gelagert ist. Da die Reibung zwischen der Alu-Armierung auf dem Kreissegment und der Stahlwelle nicht ausreichte, habe ich auf die Antriebswelle ein kurzes Stück passenden Gummischlauch gezogen. Es geht allerdings nicht mit jedem Schlauch! Ich musste einige ausprobieren, bis ich ein Material gefunden hatte, das unter der Last nicht verschleißt und auch bei Kälte nicht spröde wird. Optimal ist sicher die Verwendung einer harten Gummirolle, falls so etwas verfügbar ist. Der Radius meines Nordsegment-Kreises beträgt 445 mm, der Umfang somit etwa 2800 mm. Dies muss in knapp 24 h einmal gedreht werden. Man kann sich daraus leicht ausrechnen, dass man für Sterngeschwindigkeit nicht ganz 2 mm Vortrieb pro Minute braucht. Die Motorisierung der Antriebswelle erfolgt mit einem RB35 Gleichstrommotor von Conrad für 14 Euro (1:600 Getriebe), sowie einer 1:20 Schnecke/Schneckenrad-Kombi (auch Conrad, 8 Euro), versorgt mit einem 6 Volt Batteriesatz (4x Mignon), Schalter und einem Poti zur Drehzahlregelung. Der Motor zieht etwa 50 mA, die Batterien halten also eine ganze Weile. Mehr zu einer alternativen, etwas aufwendigeren Regelung über einen Spannungsregler gibt es hier. Meine Antriebswelle hat (inklusive Schlauchüberzug) einen Durchmesser von etwa 6.5 mm, also einen Umfang von etwa 20 mm. Sie muss sich also für Sterngeschwindigkeit mit etwa 0.1 Umdrehungen pro Minute drehen. Das entspricht mit dem 1:20 Schneckengetriebe 2 Umdrehungen pro Minute des Getriebemotors. Dies wird erreicht bei etwa 3 Volt, eingestellt über das Poti (mit einem 100 Ohm Poti hat man genug Spielraum, um die richtige Drehzahl einzustellen). Rechts in der Tabelle sind als grobe Anhaltswerte die Umdrehungszahlen pro Minute in Abhängigkeit von der anliegenden Spannung für den hier verwendeten Getriebe-Motor angegeben. Diese Werte können unter Umständen für die individuellen Motoren leicht abweichen. Im unteren Bild sieht man noch mal genau den Aufbau des Antriebs mit dem Gleichstrommotor (A), dem Schneckengetriebe (B) und der Antriebwelle mit Gummischlauch (C) in den Flanschkugellagern (D). Außerdem wurde ein Zwischenstück (E) benötigt, um zwischen den unterschiedlichen Durchmessern der Motor- und der Schneckenwelle auszugleichen. Geregelt wird das Ganze über einen Ein/Aus-Schalter (G) und den Poti (F). Hier sollte noch einmal erwähnt werden, dass das Einstellen der einzelnen Rollenlager etwas Fingerspitzengefühl erfordert, da die Lagerung des Plattformtischs überbestimmt ist (vier Rollen und ein Axiallager) und somit nicht automatisch Last auf der Antriebswelle ist. Dies ist einer der Gründe, weshalb ich persönlich den VNS Plattform-Typ bevorzuge. |
![]()
home einführung cs plattform vns plattform antrieb planung baupläne